Frontiers Gait Optimization Method for Humanoid Robots Based on Parallel Comprehensive Learning Particle Swarm Optimizer Algorithm
By A Mystery Man Writer
Last updated 21 Sept 2024


Advancements in Humanoid Robots: A Comprehensive Review and Future
Dynamic parameter identification based on improved particle swarm
Frontiers A parallel heterogeneous policy deep reinforcement

Using bilateral symmetry of the biped robot mechanism for
Frontiers Coordinating human-robot collaboration by EEG-based
Frontiers Humanoid Robot Cooperative Motion Control Based on
Frontiers A parallel heterogeneous policy deep reinforcement
Frontiers Coordinating human-robot collaboration by EEG-based

Advancements in Humanoid Robots: A Comprehensive Review and Future

Development of particle swarm clustered optimization method for

Gait Analysis Algorithms
Frontiers Gait Optimization Method for Humanoid Robots Based on

Using bilateral symmetry of the biped robot mechanism for
Recommended for you
 A single gait cycle of the human walking pattern. In the single14 Jul 2023
A single gait cycle of the human walking pattern. In the single14 Jul 2023 Gait biomechanics14 Jul 2023
Gait biomechanics14 Jul 2023 Buy Chitra Stainless Steel Heavy Double Support for 2 Curtain Rod14 Jul 2023
Buy Chitra Stainless Steel Heavy Double Support for 2 Curtain Rod14 Jul 2023 Dual Pipe Support For Rooftop Pipe Systems- PSE - 2-214 Jul 2023
Dual Pipe Support For Rooftop Pipe Systems- PSE - 2-214 Jul 2023 structural engineering - Optimal placement of two support points14 Jul 2023
structural engineering - Optimal placement of two support points14 Jul 2023- Frontiers Gait Optimization Method for Humanoid Robots Based on14 Jul 2023
 Ceiling Mounted (suspended) Shower Rod14 Jul 2023
Ceiling Mounted (suspended) Shower Rod14 Jul 2023 LoL players frustrated at new “broken” double support item strategy - Dexerto14 Jul 2023
LoL players frustrated at new “broken” double support item strategy - Dexerto14 Jul 2023 The Drape Designer Kit™ - Double Layer-Drape Designer Backwall Kits, Wedding Decor14 Jul 2023
The Drape Designer Kit™ - Double Layer-Drape Designer Backwall Kits, Wedding Decor14 Jul 2023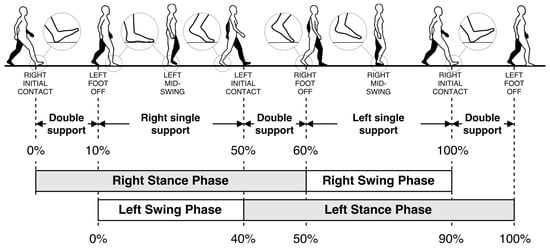 Sensors, Free Full-Text14 Jul 2023
Sensors, Free Full-Text14 Jul 2023
You may also like
 Womens Thai Fisherman Pants Palazzo Wrap Yoga Jacquard Sarong Silk14 Jul 2023
Womens Thai Fisherman Pants Palazzo Wrap Yoga Jacquard Sarong Silk14 Jul 2023 Japanese Cute Kawaii Pantyhose SE1779 – SANRENSE14 Jul 2023
Japanese Cute Kawaii Pantyhose SE1779 – SANRENSE14 Jul 2023 Artan Ballet Turning Board Spinner for Dancers, Figure Skaters, and Gymnasts, Practice Turn, Balance, Pirouette, and Dancing Body Alignment, Non-Slip14 Jul 2023
Artan Ballet Turning Board Spinner for Dancers, Figure Skaters, and Gymnasts, Practice Turn, Balance, Pirouette, and Dancing Body Alignment, Non-Slip14 Jul 2023 adidas sports bra small, climalite, black14 Jul 2023
adidas sports bra small, climalite, black14 Jul 2023 Ophelia Sleeveless Maxi Dress14 Jul 2023
Ophelia Sleeveless Maxi Dress14 Jul 2023- Relaxed Fit Prepster Twill Pants14 Jul 2023
- Copper Fit™ Core Shaper - S/M Charcoal, 1 ct - Baker's14 Jul 2023
 Yoga For Beginners: Vinyasa Yoga: The Complete Guide to Master14 Jul 2023
Yoga For Beginners: Vinyasa Yoga: The Complete Guide to Master14 Jul 2023 Horizon Paragon X 跑步機 – Johnson Fitness Store14 Jul 2023
Horizon Paragon X 跑步機 – Johnson Fitness Store14 Jul 2023 Best practices: Why use Golang for your project14 Jul 2023
Best practices: Why use Golang for your project14 Jul 2023

