How to store multiple poses? - General Application Help: How do I? - Universal Robots Forum
By A Mystery Man Writer
Last updated 22 Sept 2024

Hi, I need to store multiple positions/poses of the robot to access them later in the program. The number of positions depends on the user input - the query works perfectly. I thought I could just make a loop and fill each pose into an array but it does not work. I know how to store a pose in a single variable but in my application the user decides how many poses he needs to store. Can anyone shed some light here? Thanks and best regards Stephan PS: oh and where can I change my username to
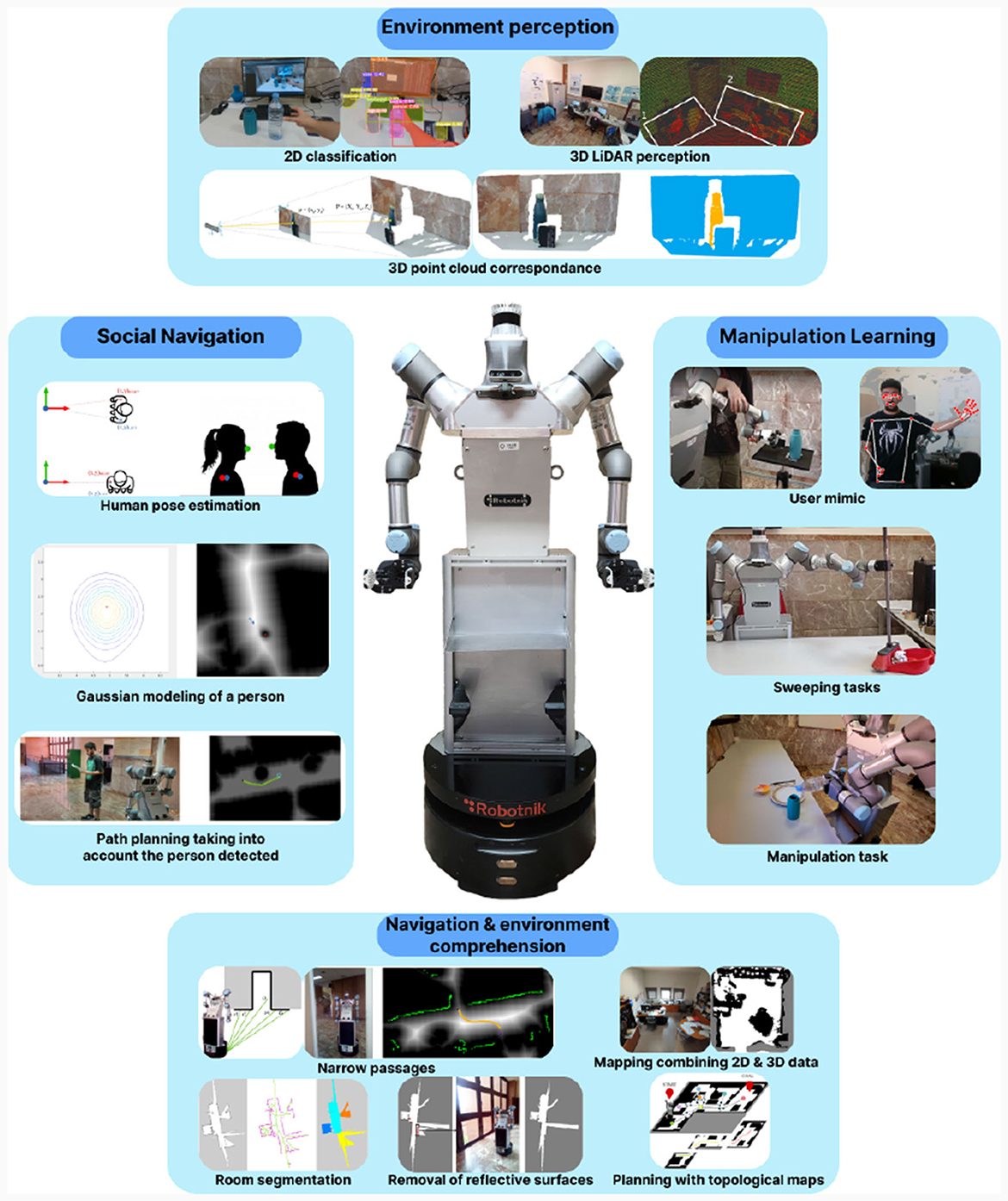
Frontiers ADAM: a robotic companion for enhanced quality of life in aging populations
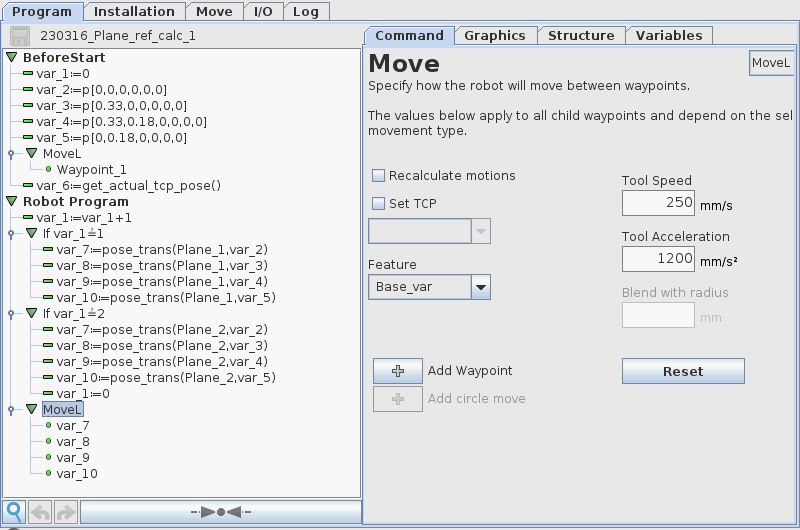
Planes and position variables 2 – UR Forum-Help-Q&A

Industrial Robots, Fundamentals of Industrial Robots

Move with Offset - Product Wishlist - Universal Robots Forum
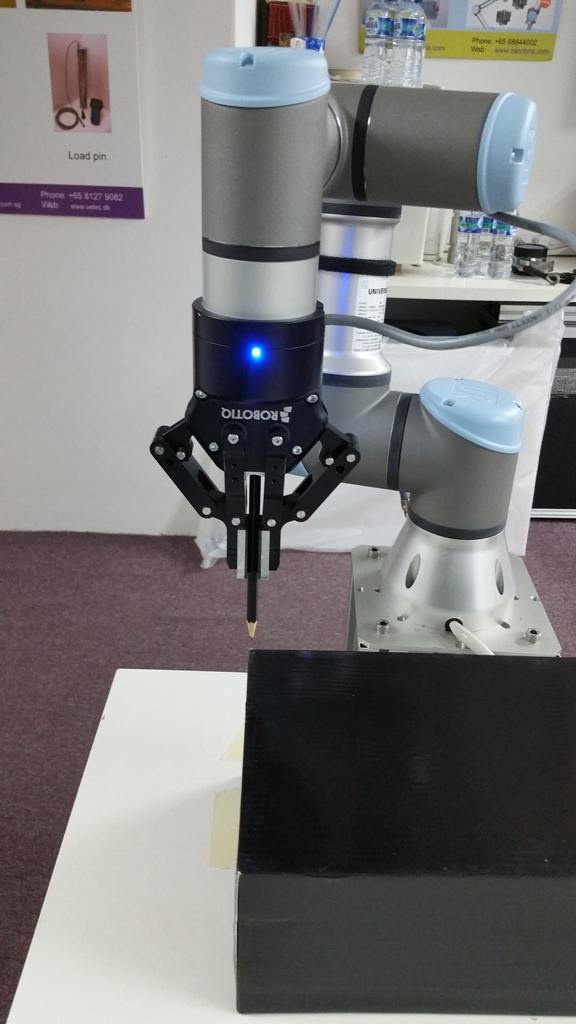
Planes and position variables 2 – UR Forum-Help-Q&A
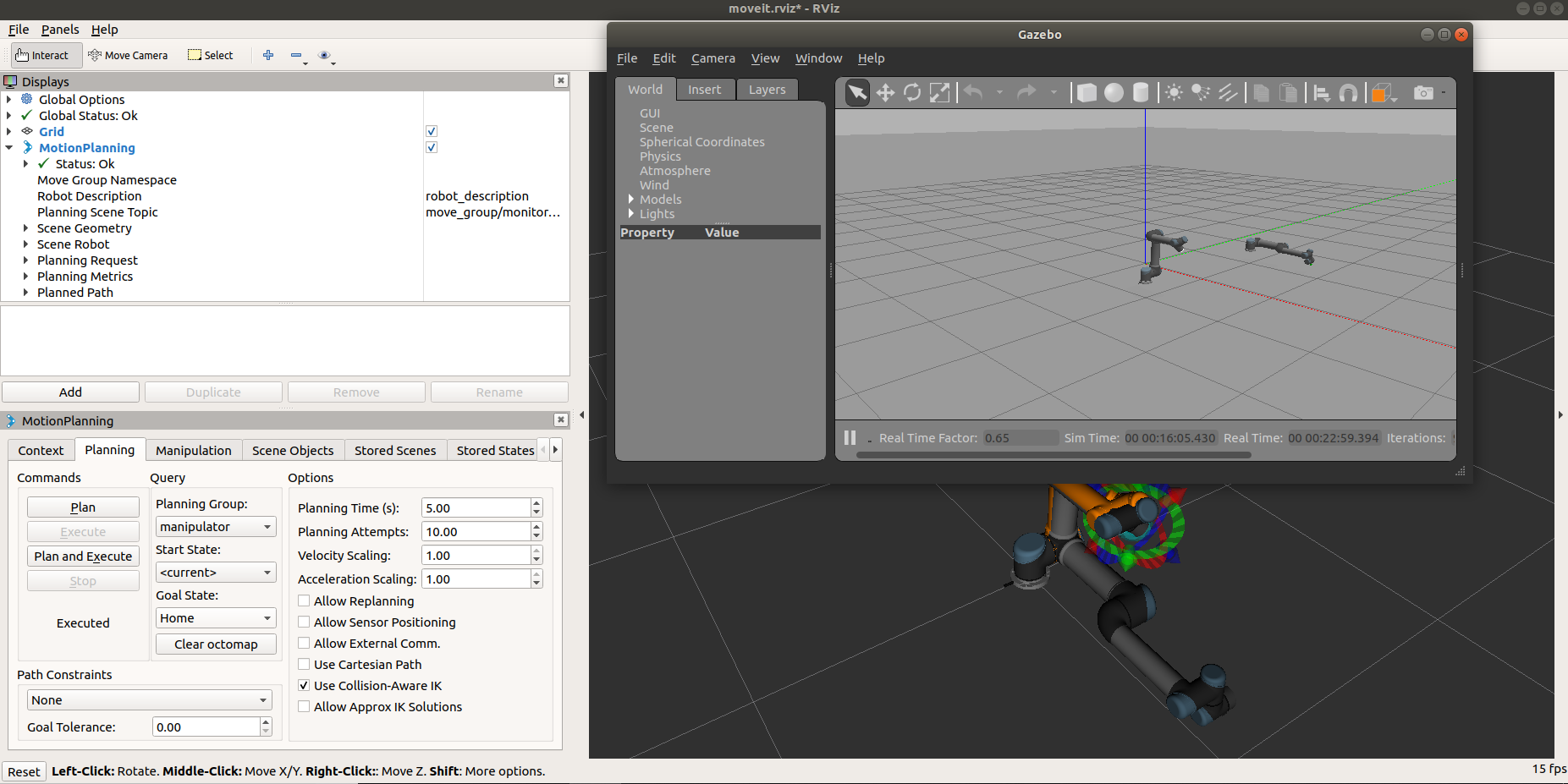
How to Control Two Universal Robots (UR-5) in the same Simulation Window - ROS for Industrial Robots 101 - The Construct ROS Community

Amazing takeaway from #A3Forum2024! Robotics creates jobs in manufacturing!, Jake Hall posted on the topic

Some AI research areas and their relevance to existential safety — AI Alignment Forum
New Report: Risky Analysis: Assessing and Improving AI Governance Tools
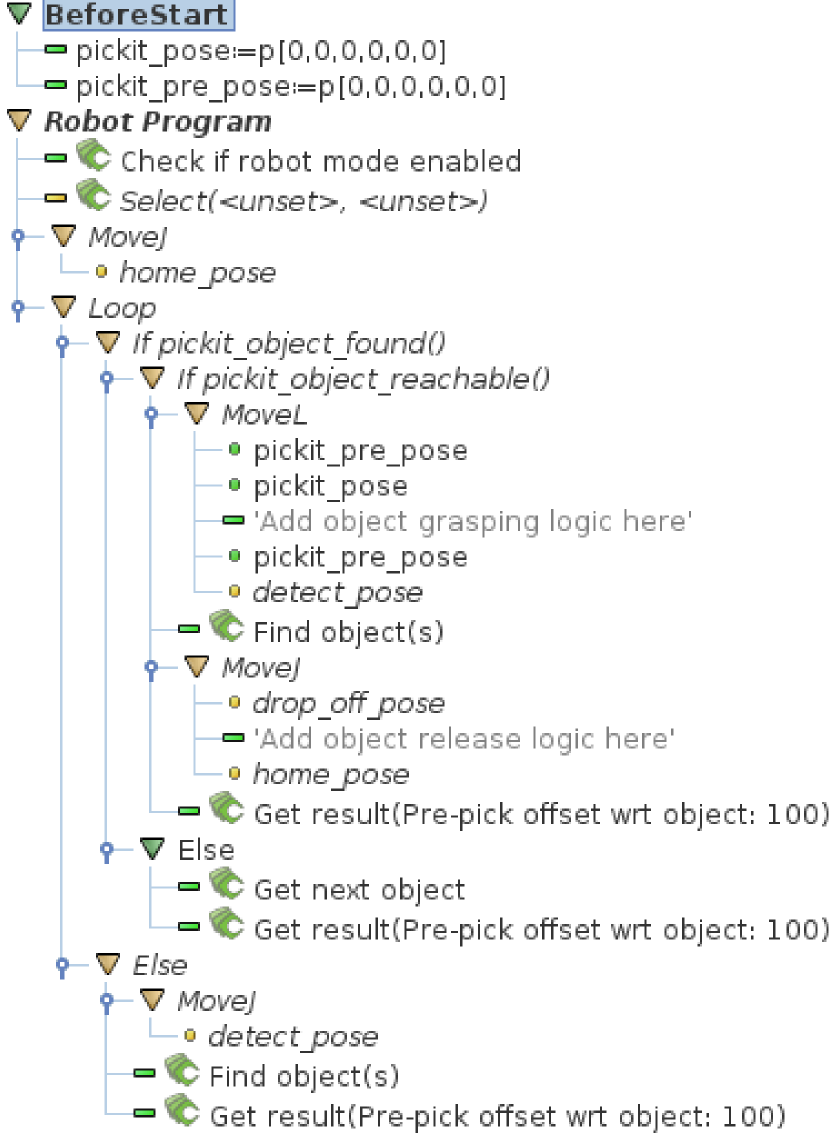
Universal Robots URCap example picking program — Pickit 1.10 documentation

How to make a robot - FutureLearn

Machines, Free Full-Text
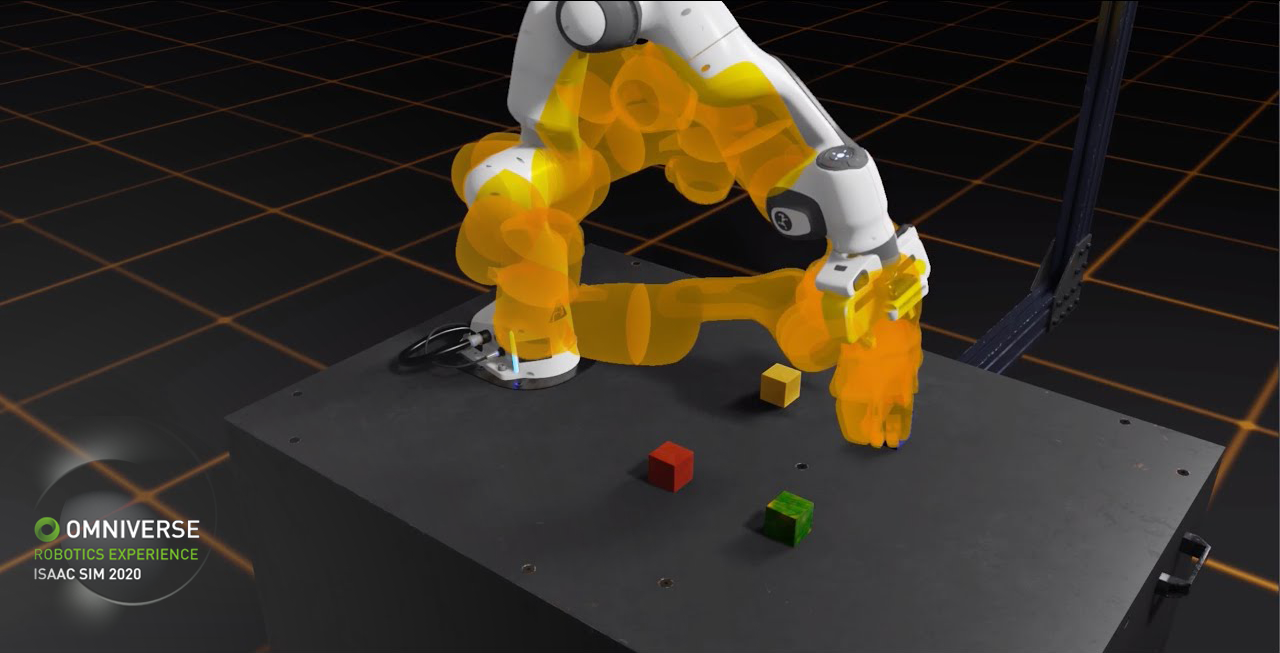
Accelerating Robotics Simulation with NVIDIA Omniverse Isaac Sim

Problem with getUserDefinedRobotPosition / joint positions - Technical Questions - Universal Robots Forum

Problem with getUserDefinedRobotPosition / joint positions - Technical Questions - Universal Robots Forum
Recommended for you
- Solved: How to? Remove duplicate rows from a Sharepoint L - Power Platform Community14 Jul 2023
![COPIER]|PAPER, AND TIME SAVING FUNCTIONS|BP-70M65|03-03_002|manual download|MFP / Copier / Printer products|Office solution: Sharp](https://global.sharp/restricted/products/copier/downloads/manuals/bp70m65/en/img/copy_fc_blank-c.png) COPIER]|PAPER, AND TIME SAVING FUNCTIONS|BP-70M65|03-03_002|manual download|MFP / Copier / Printer products|Office solution: Sharp14 Jul 2023
COPIER]|PAPER, AND TIME SAVING FUNCTIONS|BP-70M65|03-03_002|manual download|MFP / Copier / Printer products|Office solution: Sharp14 Jul 2023 Women's Workout Kit - Bodycon Two Piece Crop Top and14 Jul 2023
Women's Workout Kit - Bodycon Two Piece Crop Top and14 Jul 2023 Slim Fit Shiny Sharkskin Men's 2 Piece Suit in Red14 Jul 2023
Slim Fit Shiny Sharkskin Men's 2 Piece Suit in Red14 Jul 2023 Men's Slim Fit Sharkskin 2 Piece Suit14 Jul 2023
Men's Slim Fit Sharkskin 2 Piece Suit14 Jul 2023 Organise & search your Library - EndNote - Library Guides at AUT14 Jul 2023
Organise & search your Library - EndNote - Library Guides at AUT14 Jul 2023 Nuanchu 4 Pieces Pacifier Holder Case Set 2 Silicone Portable Pacifier Case Cover Pouch for Diaper Bag with 2 Transparent BPA Free Pacifier Storage14 Jul 2023
Nuanchu 4 Pieces Pacifier Holder Case Set 2 Silicone Portable Pacifier Case Cover Pouch for Diaper Bag with 2 Transparent BPA Free Pacifier Storage14 Jul 2023 Skimboard for Kids Wood Construction Pool 2 Sizes Multiple Designs Skim Board14 Jul 2023
Skimboard for Kids Wood Construction Pool 2 Sizes Multiple Designs Skim Board14 Jul 2023 Laundry Shirt14 Jul 2023
Laundry Shirt14 Jul 2023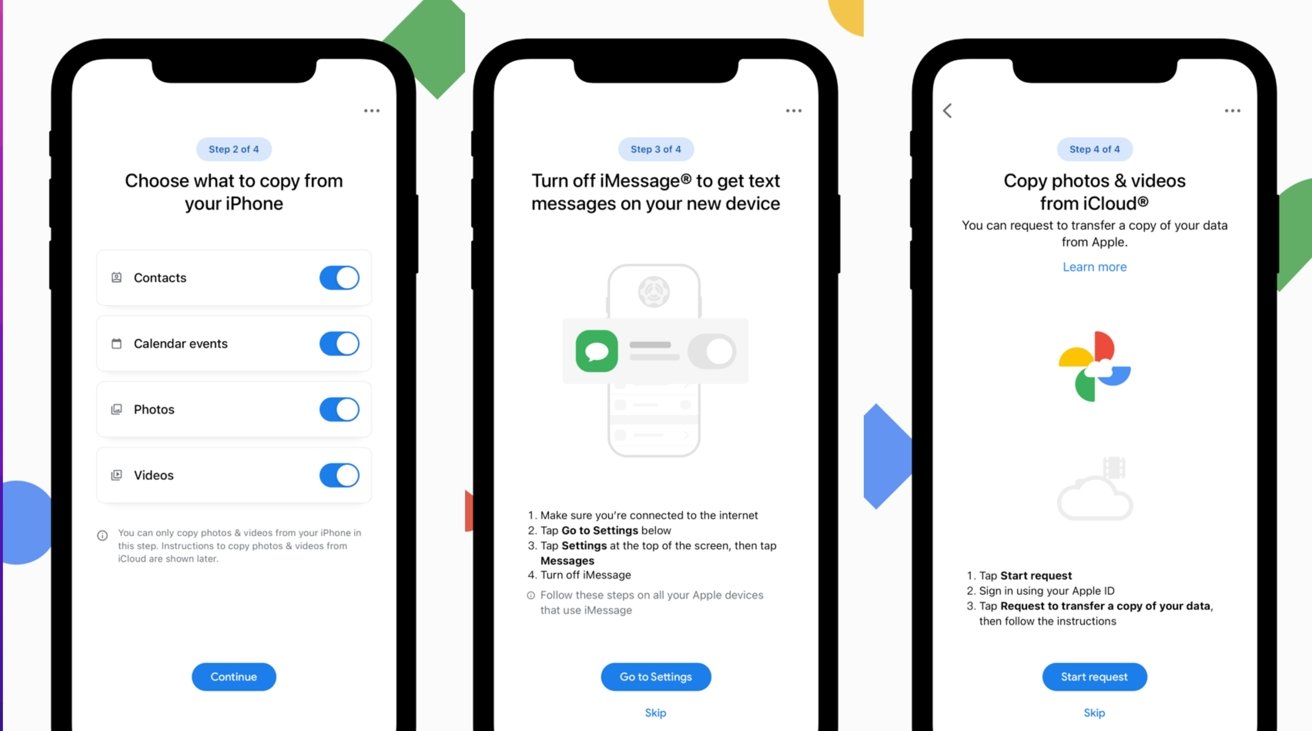 Google takes six years to copy Apple in releasing 'Switch to Android' app for iOS14 Jul 2023
Google takes six years to copy Apple in releasing 'Switch to Android' app for iOS14 Jul 2023

You may also like
- When I close my eyes I see you. When I open my eyes I miss you14 Jul 2023
 High Hip Briefs Pure Cotton Mens Underwear Mens Underwear Wholesale, From Hongzhang, $44.1114 Jul 2023
High Hip Briefs Pure Cotton Mens Underwear Mens Underwear Wholesale, From Hongzhang, $44.1114 Jul 2023 Heavy Duty Overbust Corset Waist Trainer Double Steel Boned Shaper Womens White Corset (3XS, White) at Women's Clothing store14 Jul 2023
Heavy Duty Overbust Corset Waist Trainer Double Steel Boned Shaper Womens White Corset (3XS, White) at Women's Clothing store14 Jul 2023 Lucky Brand Gene Montesano Hipster Vintage Straight Jeans Mens Tag 34 (35x29)14 Jul 2023
Lucky Brand Gene Montesano Hipster Vintage Straight Jeans Mens Tag 34 (35x29)14 Jul 2023 Aubade Womens Femme Glamour Half-Cup Bra14 Jul 2023
Aubade Womens Femme Glamour Half-Cup Bra14 Jul 2023 Luminous Lace Longline Bralette, Glow Satin14 Jul 2023
Luminous Lace Longline Bralette, Glow Satin14 Jul 2023 Premium Photo A woman in a native american costume with feathers14 Jul 2023
Premium Photo A woman in a native american costume with feathers14 Jul 2023 Rugs - Mats - Runners - IKEA14 Jul 2023
Rugs - Mats - Runners - IKEA14 Jul 2023 Midsummer Night Illusion Butterfly Resin Mermaid Corset Bra Top Cospla14 Jul 2023
Midsummer Night Illusion Butterfly Resin Mermaid Corset Bra Top Cospla14 Jul 2023 Pilates Comfort Gym Mat 180cm x 63cm x 15mm - Burgundy14 Jul 2023
Pilates Comfort Gym Mat 180cm x 63cm x 15mm - Burgundy14 Jul 2023
